Technologie zur sensorlosen Regelung von Synchronmotoren
Auf dieser Seite erhalten Sie nähere Informationen und Details zur sensorlosen Regelungstechnologie:
- Funktionsweise
- Darstellung der erreichbaren Performance am Prüfstand
- Minimale Hardwareanforderungen
1. Funktionsweise
Die entwickelte sensorlose Regelungstechnik ermöglicht es, eine hochdynamische Drehmoment-, Drehzahl- oder Positionsregelung für Synchronmaschinen und Schrittmotoren ohne den Einsatz von Lagesensoren (Inkrementalgeber, Resolver…) zu implementieren. Hierbei wird lediglich die ohnehin vorhandene Strommessung benötigt.
Anhand der ohnehin gemessenen Phasenströme wird die aktuelle Rotorposition modellbasiert rekonstruiert, so dass eine kontinuierliche Rotorposition für die Motorregelung zur Verfügung steht. Die Berechnung der aktuellen Rotorposition erfolgt hierbei über die Auswertung zweier Eigenschaften des Synchronmotors:
- Im mittleren und hohen Drehzahlbereich wird die Lageinformation EMK-basiert rekonstruiert. Dies geschieht durch eine modellbasierte Auswertung der induzierten Motorspannung. Das heißt eine zusätzliche Phasenspannungsmessung wird nicht benötigt. Da die EMK im Stillstand, bei Drehzahl null, nicht vorhanden ist, eignet sich diese Information nicht für den Bereich kleiner Drehzahlen.
- Für den Bereich kleiner Drehzahlen und den Stillstand wird die magnetische Anisotropie der Maschine ausgewertet. Unter der magnetischen Anisotropie versteht man eine Asymmetrie in der Motorinduktivität (Ld/Lq). Hier wird die Lageinformation durch eine Analyse der Maschineninduktivität gewonnen. Dafür wird über den Umrichter ein spezielles Testsignal in die Maschine eingeprägt. Anhand der Systemantwort, welche über die Strommessung erfasst wird, wird die aktuelle Rotorposition rekonstruiert.
2. Darstellung der erreichbaren Performance am Prüfstand
Die Implementierung einer hochdynamischen Positionsregelung stellt im Bereich der sensorlosen Regelung die anspruchsvollste Aufgabe dar. Um dies zu ermöglichen, muss die Motorregelung dazu in der Lage sein, das maximale Motormoment bis hin zum Stillstand zur Verfügung zu stellen. Zudem muss das rekonstruierte Rotorlagesignal eine ausreichend hohe Auflösung und Genauigkeit besitzen. Nachfolgend wird die erreichbare Performance anhand zweier Messungen dargestellt.
Führungsverhalten
Hochdynamischer Positioniervorgang um 7,5 mechanische Umdrehungen. Hierbei werden Beschleunigungswerte von 1.000.000 rpm/s erreicht. Aufgrund der Polpaarzahl von 4 entspricht dies sogar einer elektrischen Beschleunigung von 4.000.000 el rpm/s.

Störverhalten
Positionsregelung auf feste Sollposition (180° mech) mit einem Lastsprung auf das doppelte Nennmoment der Prüflingsmaschine:

Infos zu den Graphen:
Dargestellt sind die Signalverläufe der sensorlosen Positionsregelung. Das erste Fenster zeigt den Verlauf der geschätzten Drehzahl in rot und der zur Referenz gemessenen Drehzahl in blau. Im zweiten Fenster ist in rot der geschätzte und in blau der zur Referenz gemessene mechanische Rotorwinkel dargestellt. Im dritten Fenster ist der elektrische Schätzfehler in rot und der mechanische Schätzfehler in blau dargestellt. Dies stellt die Genauigkeit der sensorlosen Regelung in °el beziehungsweise °mech dar. Im vierten Fenster ist in rot der d-Achsen Strom und in blau der q-Achsen Strom dargestellt.
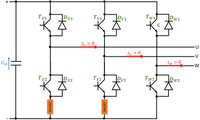
3. Minimale Hardwareanforderungen
Mit nachstehender Abbildung werden die minimalen Hardware Voraussetzungen für den Antriebsumrichter verdeutlicht. Es müssen mindestens zwei Phasenströme gemessen werden. Hierbei kann, wie in der Abbildung dargestellt, eine Strommessung in der Low-Side Konfiguration eingesetzt werden. Zusätzlich muss eine Information über die anliegende Zwischenkreisspannung vorliegen. Für die Erfassung der Messwerte ist ein einfacher A/D-Wandler ausreichend.
NEWS:
Wir waren einer der Aussteller für
das PRAXISFORUM ELEKTRISCHE ANTRIEBSTECHNIK vom 13. bis 15.10.2020 in Würzburg.